




Nathan Santangelo
 Institute: Texas A&M University
Institute: Texas A&M University
TAMU Mentor: Dr. Amir Asadi
Graduate Student Mentor: Ozge Kaynan
Research Project: Carbon Fiber Based Electrodes for a Structural Lithium-Ion Battery
Description:
Despite recent advances and complicated processing in lithium-ion batteries, the current batteries use materials that do not optimize the weight or energy density of the electrode. In this research, we investigate carbon fiber (CF) electrodes as CF is a lightweight composite material with high stiffness, strength-to-weight ratios, and good electrical conductivity. Lithium iron phosphate (LFP) is ideal for the positive electrode because of its structural and chemical stability; however, integrating them with CFs is challenging due to the harsh toxic processing. To overcome this issue, we propose a water-based coating approach to transfer LFPs on CF for positive electrodes, which promotes its scalability and provides non-toxic processing. Herein, cellulose nanocrystals (CNCs) assist the dispersion of the LFPs and graphene nanoplatelets (GNPs) in water using probe-ultrasonic treatment. CNC- LFP-GNP suspension is used as a coating suspension to transfer hybrid solutions through the surface of CF. To manufacture the composite material for testing, coated CFs are combined with polymer-electrolyte via vacuum- assisted resin transfer molding. The finished composites are then tested to reveal their structural (e.g., bending test) and electrochemical (e.g., cyclic voltammetry) properties. This method of manufacturing structural lithium- ion batteries could be used by the aerospace, automotive, electronic, and industrial industries, the military, and the Department of Defense to create lighter batteries that store more energy.
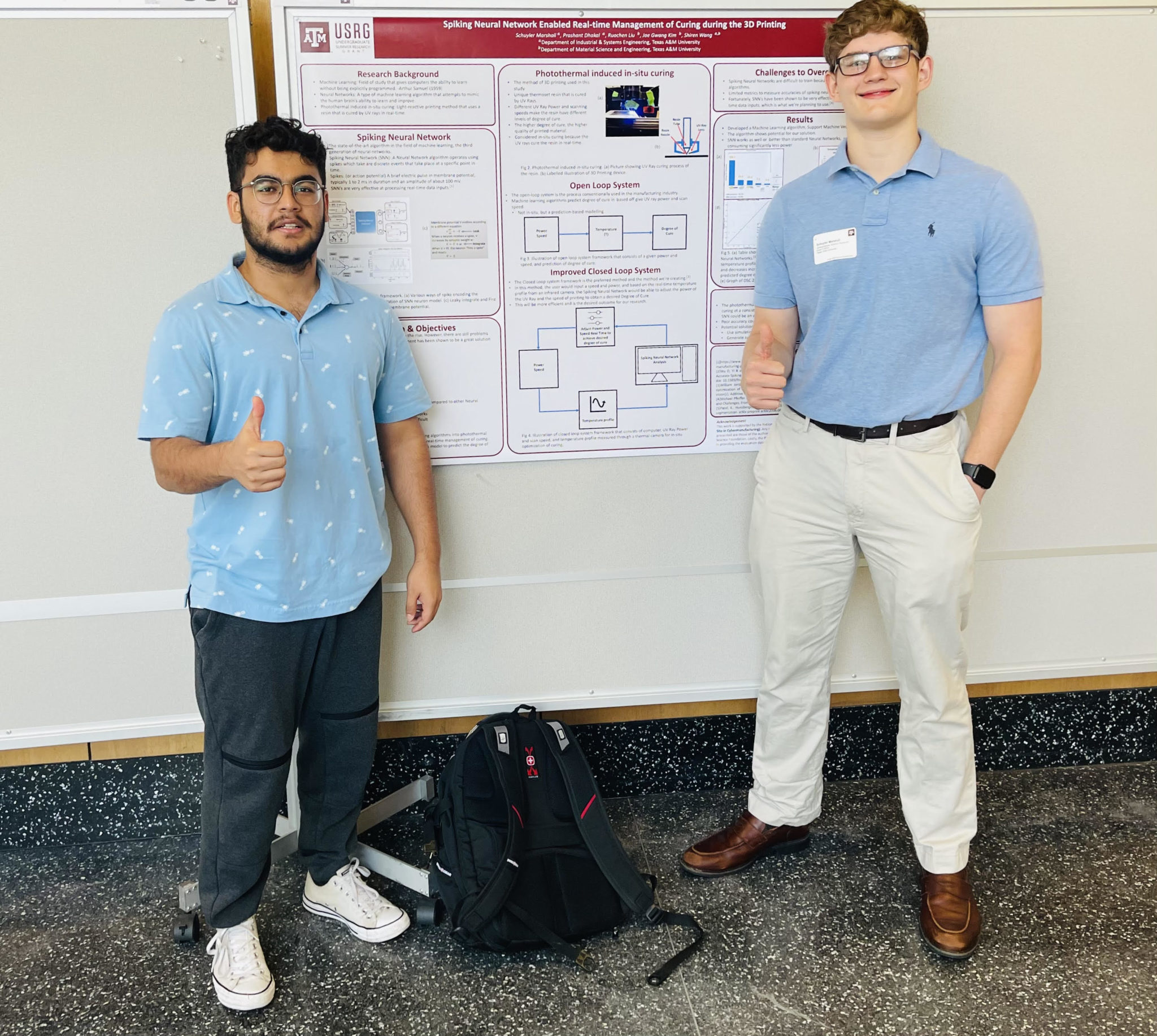
Schuyler Marshall
 Institute: Texas A&M University
Institute: Texas A&M University
TAMU Mentor: Dr. Shiren Wang
Graduate Student Mentor: Prashant Dhakal
Research Project: Machine Learning in Manufacturing Environments
Description:
This study is focused on Spiking Neural Networks’ improving viability in low-trial industrial applications. The purpose of our research was to analyze a specific material’s industrial viability before completing a 3D print. By first examining a spiking neural network with a large amount of bearing fault diagnostic data, we were able to use this pre-trained neural network and modify it to our needs. This was critical because the specific material is difficult to obtain and replicate in a mass scale, making the data difficult to produce. A pre-trained neural network allowed data sorting of this material to be possible.
Maanya Gulati
 Institute: Texas A&M University
Institute: Texas A&M University
TAMU Mentor: Dr. Amarnath Banerjee, Dr. Bimal Nepal
Graduate Student Mentor: Madhusudhan Gopalaraju
Research Project: Error Detection in Factory Settings, During Era of Industry 4.0
Description:
This study is focused on error detection in factory layouts. On a large scale, errors in factory settings can have catastrophic consequences whether that be supply chain backup, accidents within the facility, damaged raw goods, etc. My project aims to establish effective methods of error detections within a factory setup using Raspberry Pi and the Fischer Technik Industry 4.0 Factory layout. The sensors will monitor different aspects of the factory simulator (vibrations, colors, audio, etc.) and I am using machine learning to help determine what successful runs of the simulator look like versus unsuccessful runs. This was all made possible through Raspberry Pi, Python, and Fischer Technik Technologies
Gabrielle Nichols
 Institute: Texas A&M University
Institute: Texas A&M University
TAMU Mentor: Dr. Arun Srinivasa
Graduate Student Mentor: Alekhya Banki
Research Project: High speed capture of architecture material lattice structures.
Description:
Architected materials can provide unique material properties determined by their lattice structures and unit cell composition. These materials provide unique mechanical properties not obtainable through traditional materials. The different mechanical properties of the lattice are determined through various unit cell organization. The structure of the cell, the size of the cell as well as the dimensions of the lattice all have an impact on its behavior. It is important to understand how the structures fail so they can be implemented in a viable way. By capturing the fracture patterns of these lattice architecture materials, their failure patterns can be observed. Using high speed imagery, we aim to capture the fracture patterns of three-unit cell lattice structures in various void ratios and shape ratios. The lattice structures are fabricated via additive manufacturing (stereolithography). Understanding the failure patterns of architecture materials and additive manufacturing are essential for future implementation
Carolina Villarreal
 Institute: Texas A&M University
Institute: Texas A&M University
TAMU Mentor: Dr. Prabhakar Pagilla
Graduate Student Mentor: Jie Hu & Jay Shah
Research Project: Human Robot Interaction in Robotic Welding
Description:
Robots are widely used in welding by manufacturers all over the world. Robotic welding makes a welder’s job simpler, quicker, and safer due to the aid of a robot instead of a human doing the heavy work when completing a welding task. Ever since the 1980’s when robotic welding became a popular tactic to use in the automotive manufacturing industry, it expanded to other industries and became one of the most efficient ways to get a job done. There are many benefits of robotic welding such as the high quality of welds a robot could create, the increased productivity of the welds, and an increased level of safety that workers are in. Manufacturers are now able to create more complex welds at a lower cost and higher productivity with the use of robots to do their task instead of themselves. Although there are many benefits to robotic welding, an ongoing issue is that path planning in fully automated welding requires the accurate locations of the workpieces, for which human intervention is often needed. Human operators can also select the key points for measurement to obtain the workpiece locations. There are also cases where human operators can identify potential obstruction during welding and welds with poor quality. In this project, I aim to do a thorough analysis on the current robotic welding methods and summarize the advantages and disadvantages. I will then use my knowledge of robot kinematics to plan paths for welding and develop methods to make robotic welding more efficient with human assistance. I will then discuss the future of robotic welding and how to further develop human robot interaction strategies for welding in the years to come.
Martina Viteri
 Institute: Texas A&M University
Institute: Texas A&M University
TAMU Mentor: Dr. Amarnath Banerjee
Graduate Student Mentor: Madhusudhan Gopalaraju
Research Project: Access Control Simulation in a Manufacturing Plant
Description:
Not only do access control systems protect a building and its occupants, but these systems may also reduce wasted energy in unoccupied sections of a plant, and they can provide the owner of the premise reassurance regarding security. This project simulates a minimum-security access control system. The simulation entails programming an NFC reader to grant or deny access through a gate. By recording IDs and duration of visitation to designated areas, an audit trail will be accessible electronically to company owners. Audit trails indicate effective monitoring of manufacturing activities. Reviewers can use an audit trail to recognize unusual activities, and with proper analysis of audit trails, companies can focus on optimizing specific operating systems in the plant.